
祝 琳 钱宇彬 郭风虎
(上海工程技术大学 上海 201620)
随着人们经济水平的提高和汽车技术的不断发展,汽车已经逐渐成为家庭的标配,随之而来的问题就是道路交通的拥堵程度日益增加,交通事故的数量也在逐年增加[1],研究表明,在我国交通事故发生率是发达国家的6 倍~18 倍[2]。通过分析我国道路交通情况,可以发现在交叉路口处的事故发生率占到了总体交通事故70%,而在交叉路口处发生的事故又有70%~90%是因为驾驶员操作不当所造成的[3]。如今交通的拥挤程度在逐渐增加,人们为了节约时间和考虑环保等因素,电动两轮车逐渐成为人们短距离出行的主要交通工具,涉及电动两轮车的交通事故量、骑车人伤亡数都在急剧上升,如何在驾驶员未操作的情况下进行车辆控制,从而避免碰撞显得尤为重要[4]。国内外根据真实的事故对车-车避撞中AEB 系统在各种事故形态下的效果进行了研究,并根据相关研究对AEB 系统进行了测试与优化,建立了相关AEB 系统的测试方法[5~12],但是借鉴国外的测试场景不能够反映复杂的中国道路交通特征,目前还没有针对具有中国特色的电动两轮车的主动避撞系统。因此本文将对危险目标为电动两轮车的事故进行分析,进行交叉路口处汽车对电动两轮车的AEB 控制策略的研究。
论文以所选的NAIS-松江地区的62 起真实轿车-电动两轮车事故案例进行深度分析,并通过PC-Crash 软件进行事故重建,整合得到完整的前期数据库,数据样本信息见表1。
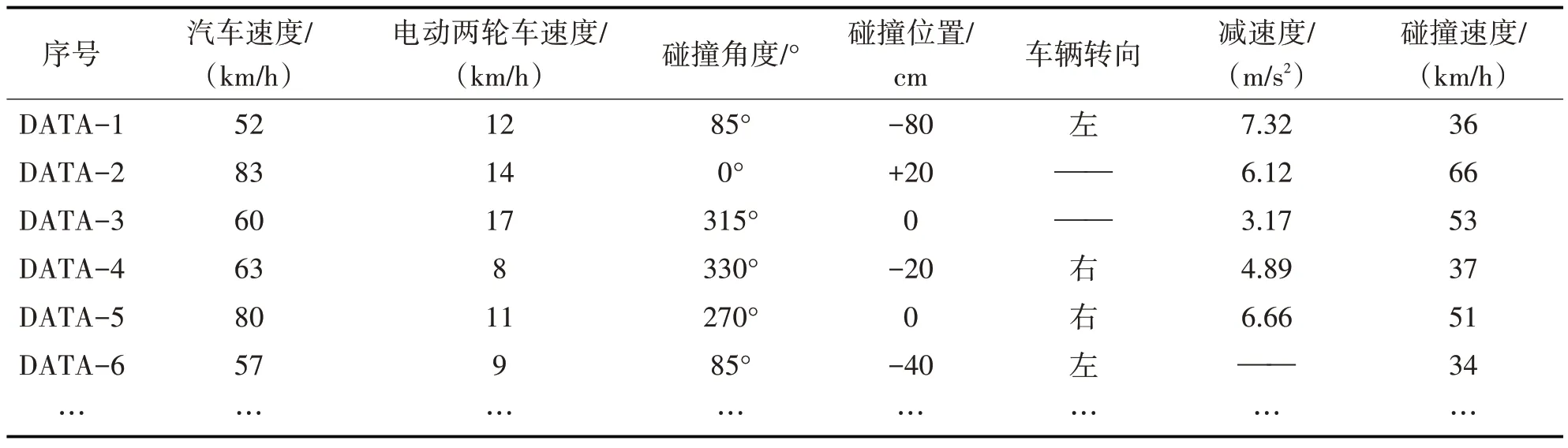
表1 事故信息
3.1 预警及分级制动工况
针对国内复杂的交通场景,分级制动[13]选用了三种情况分析汽车与电动两轮车的运动工况。
1)接近静止障碍物
当进行部分制动时可以判断制动距离为
2)接近匀速障碍物
自身车辆制动距离:
3)接近减速障碍物
自身车辆制动距离:
前车制动距离:
3.2 预警及制动时间阈值
在建立事故信息数据库中,有22 起事故是包含有EDR 数据,对于车辆在不同减速度下,达到最优的避撞程度做了相关统计,如表2 所示,考虑到车内的乘员制动冲击和制动时可能出现的车身不稳定因素[14],制动时间和制动减速度需要有一个阈值。
在仿真过程中,根据自车与电动两轮车之间的状态,LRR,SRR 实时监测两车之间的距离,由两车之间的相对速度,计算出即将发生碰撞时间T,由此可判断时间指标Tb,定义:1)Tb=3.7s 时,执行AEB 系统的预警策略,提示驾驶员,前方有危险发生,监测驾驶员是否对车辆采取措施解除危险。2)如果驾驶员未对车辆进行采取措施,将在Tb=1.7 s时对车辆施加4m/s2的制动减速度进行预制动使车速降下来一部分,从真实EDR数据和表2中可知驾驶员最常用的制动减速度为4m/s2~5m/s2,考虑到策略可靠性和驾驶员舒适性,选用4m/s2的制动减速度进行预制动,此状态下车辆的事故避免率也在60%~70%左右。3)如果在预制动情况下,驾驶员未进行紧急制动或者仍然不能避免事故发生,则会在Tb=0.7s时对车辆施加8m/s2的制动减速度,以此减速度至车辆停止或与障碍物发生碰撞为止。

表2 不同减速度下避撞时间占比
本次仿真车辆各参数模型调用CarSim 中已经搭建好的车辆动力学模型,电动两轮车选用系统自带模型,进行基本参数调整,给定运动特性,通过调入的毫米波雷达、双目摄像头传感器模型,进行整体的仿真验证工况。本文参考2018 版C-NCAP 的要求,选用CCRs、CCRm、CCRb三个测试场景,即自身车辆运动,目标车辆的运动情况分别为静止、匀速、减速[15]。再对汽车直行电动两轮车横向通过路口这个场景进行仿真分析,验证车辆在转向制动后对驾驶员的碰撞损伤减小情况的影响。毫米波雷达安装在保险杠正中间位置,双目摄像头安装在前风挡玻璃上端中间,方向皆为纵向水平向前[16]。
4.1 汽车接近静止目标
1)以30km/h接近静止目标
仿真工况:自车车速为30km/h 初始速度行驶,和目标电动两轮车之间的距离为100m,电动两轮车静止。
如图1~图4 所示,自车匀速行驶8.28s 后Tb达到车辆危险预警系统启动阈值,继续前行检测时间指标Tb达到制动阈值1.7s,此时AEB 向车辆输出-4m/s2的制动减速度,车辆匀减速接近目标。时间指标Tb持续减小,但减小速率有所下降,在11.28s 时时间指标Tb小于0.7s,此时启动紧急制动策略,控制策略向车辆输出-8m/s2的制动减速度。当11.84s自车车辆停止,此时自车和目标车辆之间的距离为3.22m。验证了文中设计的控制策略在此工况下可以避免碰撞事故的发生。

图1 两车速度变化曲线
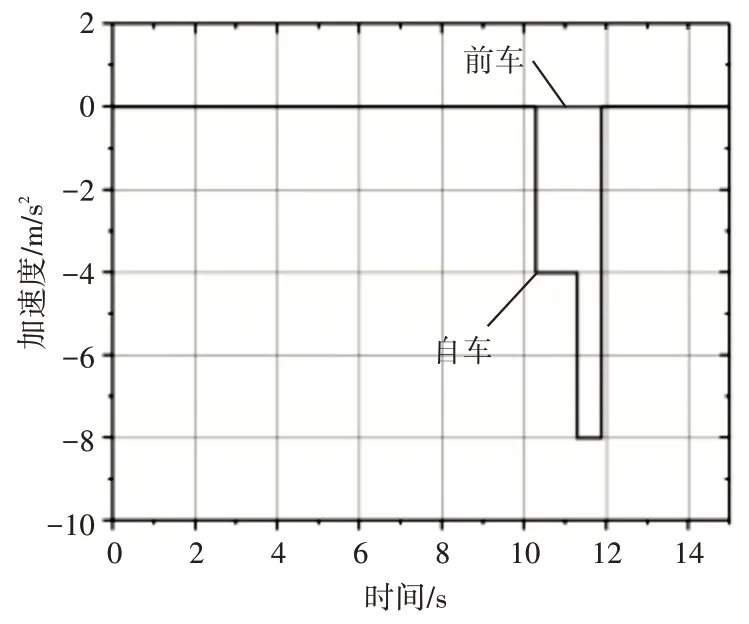
图2 两车加速度变化曲线

图3 两车相对距离变化曲线

图4 时间指标Tb变化曲线
2)以65km/h接近静止目标
仿真工况:自车车速为65km/h 初始速度行驶,和目标电动两轮车之间的距离为150m,电动两轮车静止。
如图5~图8,车辆行驶4.6s 后预警系统被触发,提示驾驶员危险接近,当Tb值小于等于1.7s时,AEB 输出一个-4m/s2的制动减速度,使车辆速度降下来在进行判断,在8.21s 时发现当Tb值小于0.7时,控制策略会输出一个-8m/s2的制动减速度,使车辆速度进行紧急降低或静止,最后在9.77s 时停止在距离目标1.65m。则可以认定为设计的控制策略可以在此工况下达到避撞效果。

图5 两车速度变化曲线

图8 时间指标Tb变化曲线

图6 两车加速度变化曲线

图7 两车相对距离变化曲线
对前期建立的数据库中的14 起关于自车接近静止目标的真实交通事故案例均进行仿真分析,得出的结果与原事故进行对比,结果如表3。

表3 CCRs场景真实事故与仿真结果对比
4.2 其他工况
对汽车接近匀速目标场景下的14起真实交通事故,汽车接近匀减速目标的14 起,汽车接近横向匀速运动目标的18 起,分别带入AEB 控制策略进行仿真验证,得出的结果与原始的事故数据进行对比,分析AEB 控制策略的效用,分别如表4~表6 所示。

表4 CCRm场景真实事故与仿真结果对比

DATA-18 DATA-24 DATA-27 DATA-30 DATA-36 DATA-39 DATA-44 DATA-48 DATA-52 DATA-53 DATA-56 DATA-58 DATA-59 DATA-62 65 38 40 60 65 57 50 66 69 58 65 44 53 72 21 19 21 14 15 20 16 27 18 21 16 22 17 17 39 10 7 10 49 20 14 42 50 22 10 16 16 13 11 0002 1 001 0 20 00000-3.21 2.00 3.14-0.79 1.80--2.14 0.70 1.30 1.13 0.79编号 VC0(km/h)VE0(km/h)VC1(km/h)VC2(km/h) D(m)
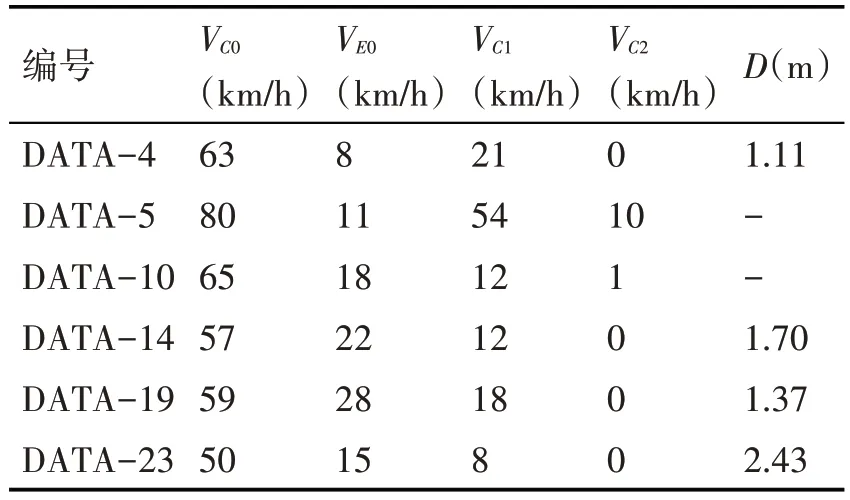
表5 CCRb场景真实事故与仿真结果对比

表6 横向匀速场景真实事故与仿真结果对比

DATA-26 DATA-32 DATA-35 DATA-40 DATA-43 DATA-45 DATA-50 DATA-54 DATA-55 DATA-61 75 66 49 50 39 58 82 62 75 48 24 20 19 15 24 15 15 20 18 23 28 23 10 17 8 21 32 12 22 13 9000001 1 000-0.84 3.00 1.21 2.17 0.97-1.29 0.50 2.70编号 VC0(km/h)VE0(km/h)VC1(km/h)VC2(km/h) D(m)
4.3 仿真结果与真实事故数据对比分析
由上文分析整理可以得到AEB 系统仿真效用分析结果,如表7。

表7 AEB系统仿真效用
由表可知,论文中AEB 控制策略在基于真实事故数据的验证中,效果较为明显。汽车车速为65km/h 以下时,接近静止目标的避撞率达到91.7%,接近匀速目标时避撞率达到91.7%,接近减速目标时达到90.9%,接近横向匀速目标时避撞率相对偏低为84.6%,车速大于65km/h时的避撞率都有所下降。但通过表3~表6的详细参数可以看出,无法避免碰撞发生的案例,碰撞时车速也相较原始数据有了较为明显的降低,可以有效地降低碰撞对骑车人带来的伤害。
论文按照C-NCAP中对AEB测试场景的规范,将62 起轿车-电动两轮车事故在仿真系统中添加AEB 控制策略后进行验证,对此AEB 系统作用前后的避撞效果做了分析,结果表明:汽车车速在65km/h 以下时,汽车接近前方静止电动两轮车、匀速行驶电动两轮车、匀速制动两轮车场景下避撞成功率均在90%以上,在汽车接近横向匀速行驶电动车的场景下,避撞率为84.6%,AEB 系统介入后,不能避免的碰撞事故,车速也有明显降低,可以有效减小碰撞对骑车人的伤害。验证了文中设计的AEB系统控制策略的可靠性。
猜你喜欢车速控制策略驾驶员基于高速公路的驾驶员换道意图识别汽车实用技术(2022年14期)2022-07-30驾驶员安全带识别方法综述汽车实用技术(2022年4期)2022-03-07工程造价控制策略山东冶金(2019年3期)2019-07-10轮速信号在定速巡航控制中的应用装备制造技术(2018年8期)2018-10-17现代企业会计的内部控制策略探讨消费导刊(2018年10期)2018-08-202012款奔驰R300车修改最高车速限制汽车维护与修理(2018年1期)2018-04-04跑跑卡丁车作文周刊·小学一年级版(2017年27期)2017-08-10起步前环顾四周是车辆驾驶员的义务公民与法治(2016年4期)2016-05-17容错逆变器直接转矩控制策略通信电源技术(2016年1期)2016-04-16基于Z源逆变器的STATCOM/BESS控制策略研究电测与仪表(2016年20期)2016-04-11