
霍俊鑫,卢晓东,姚雨晗
(1.西北工业大学 航天学院·西安·710072;
2.北京电子工程总体研究所·北京·100854)
全捷联导引头将探测器固连在弹体上,取消了传统平台式导引头复杂的机械平台,使导引头体积和成本大幅降低,跟踪速度和跟踪精度不受机械限制和摩擦力矩的影响[1]。这使得全捷联导引头的应用受到越来越多的关注,安相宇等[2]基于半捷联导引头,设计了用于估计导弹和目标在弹体坐标系中相对运动状态的扩展卡尔曼滤波器,使滤波与制导在同一个坐标系内进行,从而减少了信息损失。在传统捷联导引头视线角速率估计中,通常将弹体视作刚性体,这样可以简化模型,突出重点问题[3]。可是随着导弹弹体长细比的增加、结构质量的减小,使导弹表现出越来越明显的柔性特征[4]。导弹在飞行过程中,由于受到各种横向载荷作用,或者操纵气动控制面执行俯仰或偏航指令时,弹体会产生弯曲振动[5]。当导引头实际量测时,这种柔性振动就会耦合进导引头量测视场中,给导引头量测信息带来不必要的附加角度误差[6]。文献[7]从隔离度的角度论述了这种振荡给导引头滤波系统带来的影响。因此,不能再把导弹考虑为刚性体,而应将其视作弹性体或柔性体。
目前,柔性体的控制问题在建筑、桥梁、长臂机器人、大长细比飞行器中得到广泛研究,按照执行机构是否参与弹性振动的抑制来划分,可将抑制方法分为两类:弹性振动陷波抑制和弹性振动主动控制[8]。弹性振动陷波抑制是指在控制系统中构建滤波算法,将弹性振动信息滤除,从而阻断振动信号在控制闭环中的传递,通过被控对象本身的结构阻尼吸收振动的能量,达到抑制振动的效果[9]。目前考虑弹体柔性振荡影响下的全捷联导引头视线角速率估计的研究还很少,大多都是将两者分开来研究的。袁亦方[10]定义弹体振荡隔离度寄生回路,通过设计自适应陷波滤波器在线辨识与抑制消除弹体弹性振动的影响。文献[11]基于坐标转换重构了捷联导引头在弹性振动下的惯性视线角映射关系,采用无迹卡尔曼滤波(Unscented Kalman Filter,UKF)跟踪弹体振荡,以消除弹性振动带来的附加姿态角误差。
本文首先将基于坐标变换给出体视线角和惯性视线角之间的非线性映射关系,设计高阶容积卡尔曼滤波(Cubature Kalman Filter,CKF)实现弹目视线角速率解耦估计;
其次在考虑弹体弹性振动的情况下,采用弹性振动陷波抑制的思路,提出了一种新的导引头振动模型,并基于交互式多模型算法,设计UKF滤波器实现对弹体柔性振荡的跟踪补偿;
最后在整个滤波、制导、控制大闭环回路内,从导弹命中精度的角度考察滤波算法的性能。
为了清晰地描述导引头实际量测的角度和制导系统所需要的视线角速度以及弹体姿态角度之间的关系,定义了地面系OXeYeZe、弹体系OXbYbZb、视线系OXsYsZs、体视线坐标系OXlYlZl以及相应的角度关系如图1所示。由于捷联导引头固连在弹体上,其测量目标是以弹体为基准的,所以其量测信息中会包含导弹弹体姿态的信息[9],其量测原理如图2所示。

图1 坐标系转换关系Fig.1 Coordinate system transformation relationship

图2 导引头量测示意图Fig.2 Measurement diagram of guiding head


(1)

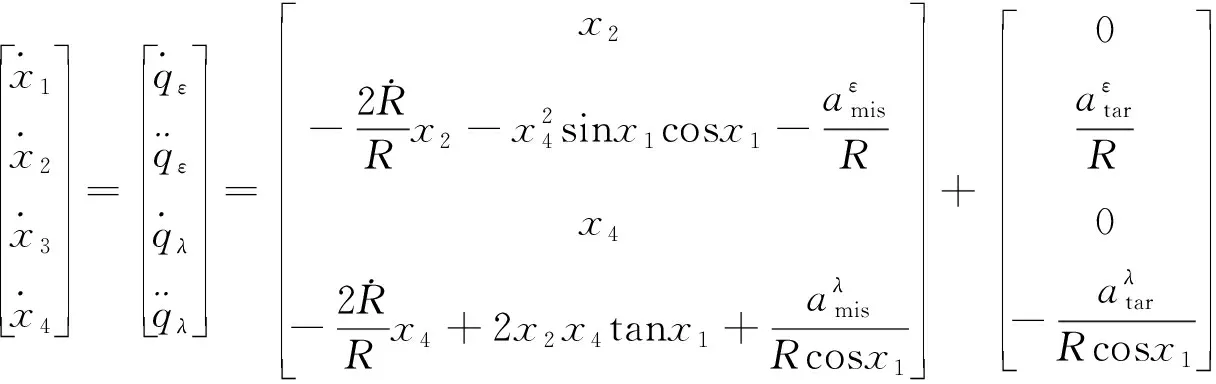
根据图1各坐标系间的转移关系,推导得到滤波系统量测方程为
(2)
式中,qα和qβ分别为捷联导引头实际量测的弹目视线高低角和弹目视线方位角;
[ϑφγ]为弹体自身俯仰、偏航和滚转角;
[vαvβ]建模为导引头量测过程中存在的高斯白噪声。
导弹在大气层内运动时,控制系统需要根据过载指令操控舵机偏转或姿控发动机侧喷,从而产生姿态控制力矩,但随着导弹长细比的增大、结构质量的减小,使得姿态控制力矩不仅仅改变弹体刚性姿态,还会引起弹体发生柔性振荡[13]。
2.1 弹体柔性振荡模型
2.1.1 弹体有限元模态分析
导弹作为一个独立的质量个体,研究其本身的弹性振动规律时,导弹本身的固有频率、模态振型、阻尼比等重要参数,需要对其进行模态分析计算得到。根据结构力学柔性振荡理论,导弹的各种动力学响应都可以用模态振型进行线性组合[14]。即
(3)
式中,{u}为位移向量;
{φi}为第i阶振型;
qi为第i阶模态位移。
导弹在大气中运动时,仅受地心引力、发动机推力和空气动力的作用,为便于分析,假设引起弹体弹性振动的只有姿控发动机推力。因此,在进行有限元建模时,弹体无需施加任何约束条件,使其处于自由状态,采用Ansys软件进行分析计算,图3给出了模型前十阶的弯曲模态。

(a) 一阶模态变形云图
由图3可知,导弹在受到姿控力矩后会发生明显的柔性振荡特征,弹体的头部和尾部的振荡幅度较弹身部分要大;
随着阶次的提高,柔性振荡的自振荡角频率会越来越大,而振荡幅度会越来越小。
工程上一般将惯导陀螺放置在一阶柔性振荡的驻点处以降低对控制系统的影响,而这种布局将导致陀螺仪无法敏感导引头位置处柔性振动带来的附加姿态角,从而使捷联导引头体视线角的量测中混入了附加的弹体姿态信息,进而导致滤波系统失准甚至发散[15]。这是导引头视线角速度估计亟待解决的问题。
2.1.2 建立弹体振动模型
以导弹尾部中心为原点O,弹轴方向为X轴,垂直弹轴向上为Y轴,建立弹体弹性振荡的二维坐标系,并沿导弹主弹轴方向取微元体(dx)。在弹性弯曲过程中,该微元的受力情况如图4所示,其中T为轴向力,Q为剪切力,M为弯矩,f为轴向单位长度上的横向激励力。

图4 导弹微元受力模型Fig.4 Micro element force model of missile
只考虑弹体柔性振荡一阶模态,可得如下关系
(4)

2.2 考虑弹体柔性振动影响的导引头滤波模型重构
针对高精度惯导陀螺安装位置无法敏感捷联导引头姿态振动,且惯导系统的陀螺由于精度很高、造价昂贵、空间体积大等问题,不适合在导引头处加装。因此,选择在捷联导引头处加装体积小、造价低廉但测量精度远低于惯导系统陀螺的微机电陀螺仪(Micro Electromechanical System,MEMS),以满足滤波系统可观性条件,如图5所示。

图5 陀螺安装示意图Fig.5 Gyro installation diagram

(5)

图6 导引头振荡坐标系Fig.6 Seeker oscillation coordinate system
同理可得导引头姿态角与振荡角间的重构公式
ϑ*=arcsin(sinϑcosθvibcosφvib+
cosϑcosγsinθvib+cosϑsinγcosθvibsinφvib)
(6)
(7)
(8)
2.3 基于IMM-UKF的弹体振荡跟踪方法
对于弹体导引头处刚性转动姿态和柔性振荡姿态的精确连续跟踪,是导引头视线角速度跟踪任务的前提,也是视线角跟踪的一大难点。基于单一模型的滤波器,在导引头发生高频快速柔性振荡时,极易产生较大误差甚至丢失目标。针对这一问题,基于多模型集的交互式多模型(Interacting Multiple Model,IMM)算法是一条有效的解决途径。本文将UKF与IMM相结合,设计了IMM-UKF方法。
(9)
式中,[ωxωyωz]为惯导陀螺的滤波输出;
[wxwywz]为系统高斯噪声。式(9)所描述的状态方程是由角度几何关系推导出的状态转移方程。
模型二:选取相同的状态变量,假设导引头MEMS陀螺的安装位置为xmems,对式(4)展开进行反拉氏变换,得到弹头部位振荡角和振荡角速度关系的微分方程
(10)
离散化后得到模型二的状态方程为

(11)
式中
Ψ11=
T为传感器采样周期。
量测模型二者相同,如下所示

(12)
式中,[vxvyvz]Τ为MEMS陀螺的量测噪声,建模为高斯不相关白噪声。
3.1 考虑弹体柔性振荡的导引头姿态角跟踪仿真
3.1.1 仿真条件及仿真背景
针对研究内容,设定弹体俯仰、偏航及滚转以正弦规律运动,仿真条件如表1所示。

表1 仿真初始条件
仿真时间取100s,采样周期取0.01s。依据仿真条件得到仿真背景如图7所示。

(a) 刚性姿态角运动
3.1.2 仿真结果
根据2.3节提供的两种滤波模型,分别得到模型一与模型二单独跟踪导引头柔性振荡角,如图8所示。
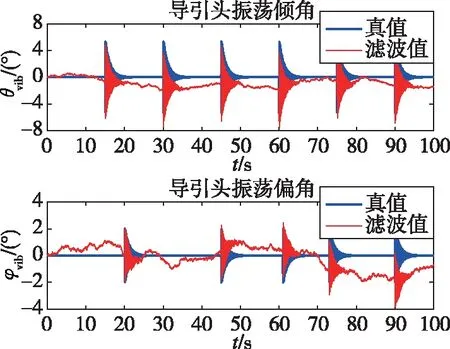
(a) 模型一振荡倾角与振荡偏角
采用IMM-UKF算法将模型一、二综合考虑后,得到柔性振荡角的跟踪结果如图9所示。

(a) 模型概率分布
三种模型的三通道滤波误差,如图10所示。
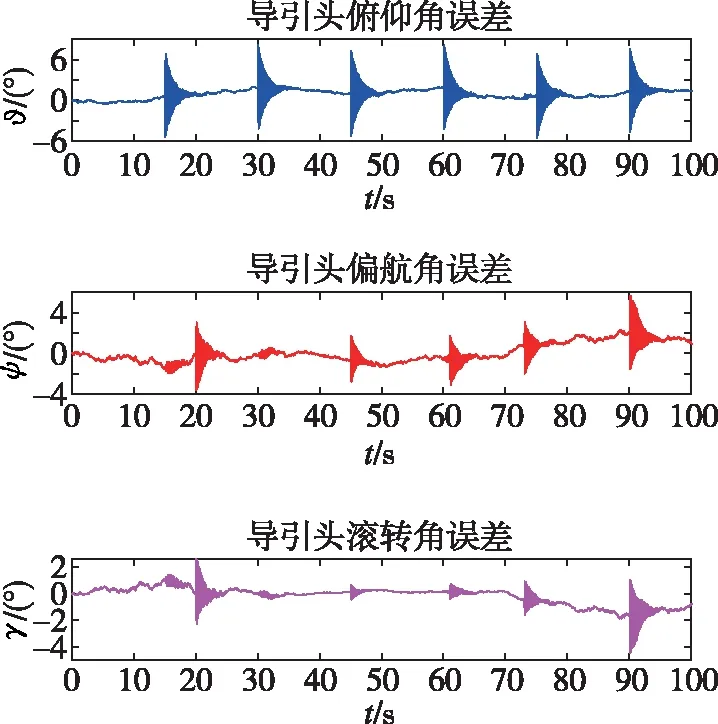
(a) 模型一
3.1.3 仿真结果分析
从图8和图10(a)、(b)可以看出,滤波模型一与滤波模型二单独对姿态角的估计存在各自的不足,模型一在弹体因姿控力矩而发生振荡时的跟踪效果不明显,模型二由于舵机偏转存在噪声,从而导致弹体刚性姿态存在较大噪声;
从图9(a)和图10(c)可以看出,交互式多模型算法结合两种模型的优缺点,在平稳段给予模型一更高的置信度,激烈的振荡段给予模型二更高的置信度,实现模型概率的实时更新,使得姿态角均方误差稳定在0.5°左右,可以实现对导引头处姿态角的估计要求。
3.2 基于高阶CKF的目标信息提取与脱靶量仿真
3.2.1 仿真条件与背景
基于第二部分交互式多模型算法得到的导引头姿态角,设计相应的弹目运动规律,为了尽可能多地展现弹目运动模式,选择机动俯冲、螺旋下降和匀加速直线三种运动模型,对应相应的视线角速度。同时基于比例导引制导率和滑模控制率设计三维六自由度地空导弹打击模型,目标做正弦机动。如图11所示。

(a) 弹目相对运动轨迹
3.2.2 仿真结果
将第三部分导引头姿态角滤波后的结果代入第一部分视线角速度提取模型中得到制导信息,并将估计得到的制导信息代入到三维六自由度的地空导弹打击模型中,进行500次蒙特卡罗打靶仿真,得到视线角速度估计结果如图12(a)所示,根据视线角推算出的目标位置估计误差如图12(b)所示,典型弹目滤波轨迹如图12(c)所示。

(a) 视线角速度跟踪
图12(c)为基于IMM-UKF对柔性振荡滤波补偿以及高阶CKF视线角速率提取算法后的三维六自由度打靶实验,当导引头测角噪声均方差在0.1°时,求得500次的蒙特卡罗打靶实验的平均脱靶量为11.27m。
3.2.3 仿真结果分析
根据上述仿真过程,针对导引头和惯导陀螺在不同的噪声特性下进行蒙特卡罗打靶仿真实验,得到平均脱靶量与噪声特性以及是否进行柔性振动在线补偿的仿真结果如表2所示。

表2 平均脱靶量与传感器噪声特性定量关系
由表2可以看出,是否引入MEMS陀螺对振荡进行滤波对最终导弹制导精度有比较大的影响,在引入MEMS陀螺后,平均脱靶量随着导引头和惯导陀螺精度的提高而快速缩小,可实现对目标的高精度打击,在理想条件下甚至可以视线碰撞打击,以达到拦截弹最佳的毁伤效果。
根据实验跟踪结果可以得出结论如下,基于IMM-UKF补偿的姿态跟踪算法可以很好地解决弹体在飞行过程中受到姿控力矩、外界气流干扰等因素而发生柔性振荡时对导弹导引头量测的干扰。高阶CKF算法实现了制导信息的提取,将结果输出至导引系统和控制系统中,得到对机动目标打击的脱靶量在接受范围之内,表明了这种方法的有效性。
本文研究了弹体柔性振荡对全捷联导引头制导信息提取的影响以及如何补偿振荡的问题,并从信息滤波、导引律、控制律的大闭环回路内研究滤波算法和传感器噪声特性等对导弹命中精度即脱靶量的影响。证明了重构后的惯导陀螺模型及其采用的IMM-UKF算法对振荡的补偿是有效的,为导弹滤波控制等参数的设计提供了有效的理论与仿真依据。
猜你喜欢捷联导引头弹体尾锥角对弹体斜侵彻过程中姿态的影响研究兵器装备工程学报(2022年7期)2022-08-10椭圆截面弹体斜侵彻金属靶体弹道研究*爆炸与冲击(2022年2期)2022-03-17STOPAQ粘弹体技术在管道施工中的应用上海煤气(2018年6期)2018-03-07弹道导弹的捷联惯性/天文组合导航方法北京航空航天大学学报(2017年5期)2017-11-23捷联惯性/天文/雷达高度表组合导航北京航空航天大学学报(2017年12期)2017-04-23全极化雷达导引头抗干扰技术制导与引信(2016年3期)2016-03-20半捷联雷达导引头视线角速度提取火控雷达技术(2016年1期)2016-02-06一种捷联式图像导引头的解耦算法弹箭与制导学报(2015年1期)2015-03-11毫米波导引头预定回路改进单神经元控制弹箭与制导学报(2015年1期)2015-03-11旋转弹控制系统结构与弹体静稳定特性研究现代防御技术(2014年5期)2014-02-28